多旋翼无人机入门第一章硬件架构(下) |
您所在的位置:网站首页 › 傲腾 无法开机怎么回事儿 › 多旋翼无人机入门第一章硬件架构(下) |
多旋翼无人机入门第一章硬件架构(下)
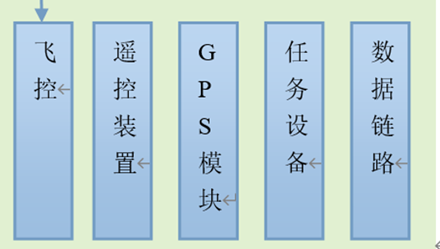
本篇主要讲解飞控,遥控装置,GPS模块,任务设备,数据链路,上位机(机载电脑)
 1.飞控:
1.飞控:
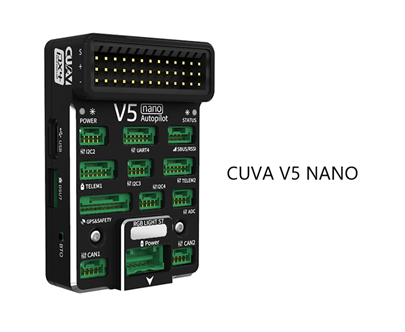
包括陀螺仪、加速度计、电路控制板、各外设接口。 大家可能都听说过px4,pixhawk,apm等词,但是无法进行一个严格的区分,在这里我就跟大家详细说明一下。 飞控硬件平台:PIXHAWK飞控是开源硬件架构,全世界很多公司出品了基Pixhawk的飞控产品。他们都有共同的硬件架构和相同的连接方式、输出接口及功能,仅仅是具体形式不同而已,例如接口的位置不同、外壳不同等等,常见有pixhawk系列(常见holybro pixhawk2.4.8 ,holybro Pixhawk4,holybro Pixhawk 4 mini),雷迅系列(CUVAV5, CUVA V5+, CUVA V5 nano,),其他产品可在PX4官网查询:https://docs.px4.io/main/zh/flight_controller/。 此外还有其他独立硬件品牌,如dji的naza系列(因官方文档完善,此处不在赘述);cc3d系列。 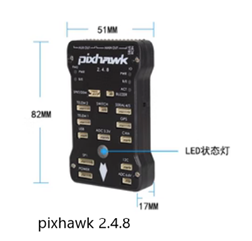

 飞控软件平台(固件):PX4,APM(ArduPilot)
飞控软件平台(固件):PX4,APM(ArduPilot)
APM固件专为Arduupilot开发的固件,现也用于PIXHAWK。有ArduCopter社区支撑、开放,功能全、迭代升级快,适合直接用。由于有较多的历史兼容性需求,软件代码体系相对杂乱,还封装了PX4的内核,学习起来困难些,目前的新设备中已较少使用。 PX4固件专为PIXHAWK硬件架构开发的固件。相对封闭,代码体系相对简单清晰,社区相对小,迭代慢一些,但因为相对清晰,适合学习研究。 地面站: PX4地面控制站被称为QGroundControl,(简称QGC)是PX4自驾系统不可分割的一部分,可以运行在Windows,OS X或Linux等多个平台。可以将PX4固件烧写到硬件,设置机器,改变不同的参数,获得实时航班信息,创建和执行完全自主的任务。 这里给出QGC官网下载地址:https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html APM地面控制站被称为Mission Planner,(简称MP)是APM自驾系统不可分割的一部分。可以将APM固件烧写到硬件,设置机器,改变不同的参数,获得实时航班信息,创建和执行完全自主的任务。 随着APM飞控软件的快速发展,AVR的板子性能已经不能满足需求,所以只能逐步移植到Pixhawk的硬件架构上来进行开发。所以,APM自驾仪软件也就兼容PIXHAWK飞控硬件了。 这里给出misson planner官网下载地址:https://firmware.ardupilot.org/Tools/MissionPlanner/ PS:Pixhawk2.4.8开发常用地面站为misson planer,之后版本的常用为QGC(QGroundControl)。 APM和PX4是两款不同开源飞控固件,均可以跑在Pixhawk这款硬件板上。 总结:PIXHAWK飞控是硬件平台,PX4和APM都是开源固件,均可以烧写到PIXHAWK飞控中。 

 2.遥控装置:
2.遥控装置:
包括遥控器和接收机,接收机装在无人机上。在第一次使用前接收机需要与遥控器对频。一般按照通道数将遥控器分成六通道、八通道、十四通道遥控器等。常见品牌有乐迪系列(AT9S,AT10),天地飞系列。 
 3.GPS模块:
3.GPS模块:
测量多旋翼无人机当前的经纬度、高度、航迹方向、地速等信息。一般在GPS模块中还会包含地磁罗盘(三轴磁力计):测量飞机当前的航向。  4. 任务设备:
4. 任务设备:
目前最多的就是云台,常用的有两轴云台和三轴云台;云台作为相机或摄像机的增稳设备,提供两个方向或三个方向的稳定控制。云台可以和控制电机的集成在一个遥控器中,也可以单独的遥控器控制。此外还有抓钩机械臂等载荷设备。  5. 数据链路:
5. 数据链路:
数据链路包括数传和图传。数传就是数字传输,数传终端和地面控制站(笔记本或手机等数据终端),接受来自飞控系统的数据信息,即将飞控从USB线连接到电脑变为无线连接,使地面在飞机飞行过程中也能看到各种传感器及飞行数据。图传就是图像传输,接受机载相机或摄像机拍摄的图像,并传回地面接收机,接收机有带屏显和不带屏显两种,不带屏显的也可使用usb连接到手机通过专用软件将手机作为监看器。一般延迟在几十毫秒,目前也有高清数字图传,传输速率和清晰度都有很大提高。 
 6. 机载电脑(非必须,自动驾驶用)
6. 机载电脑(非必须,自动驾驶用)
我们只有小脑是不够的,还要有大脑,这样才可以进行思考——如无人机的目标检测,自主避障等,但是单片机的计算能力明显不够,所以我们一般是在无人机上安装一个电脑来实现决策。目前主流机载电脑主要为Intel的NUC系列和Nvidia的Jetson系列。NUC系列目前为X86架构,Jetson系列多为Arm架构。 NUC官网:https://www.intel.cn/content/www/cn/zh/products/details/nuc.html Jetson官网:https://www.nvidia.cn/autonomous-machines/ 

7.软件整体架构 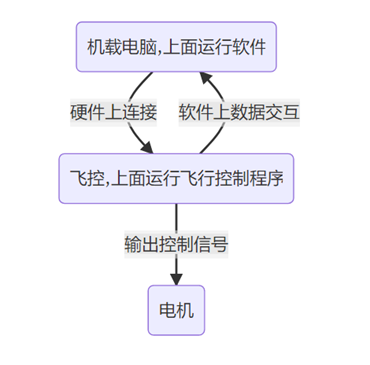 下一篇我们将讲解无人机的组装
下一篇我们将讲解无人机的组装
参考文献 PX4官网:https://docs.px4.io/main/zh/ 知乎ArduPilot与Pixhawk什么关系?https://zhuanlan.zhihu.com/p/109639638 【无人机】PIXHAWK、PX4、APM区别http://t.csdn.cn/eggia 听风南巷博客:http://t.csdn.cn/YQJcB 翎航智能科技工作室培训教材 |
【本文地址】
今日新闻 |
推荐新闻 |